using CairoMakie
using MetricSpaces
using MetricSpaces.Datasets
using TDAplots
using Random11 Ball mapper
11.1 The Vietoris-Rips complex
Another way to reduce the complexity of a metric space is to approximate it by a simplicial complex. Simplicial complexes are like small building blocks glued together: points, line segments, triangles, tetrahedra, and their higher-dimensional analogues.
The Vietoris-Rips complex is defined from a metric space \((X, d)\) and a scale \(\epsilon > 0\) by
\[ VR(X, \epsilon) = \{ [x_1, \ldots, x_n] \; ; \; d(x_i, x_j) < \epsilon \text{ for all } i,j \}. \]
So the vertices are the points of \(X\), and we add a simplex whenever all of its vertices are pairwise close enough. This is one of the most common ways to turn a metric space into a combinatorial object.
11.2 The ball mapper
Ball Mapper is clearly inspired by the Vietoris-Rips complex, but it restricts the centers of the balls to a chosen subset of landmark points. Given a metric space \((X, d)\), a subset of indices \(L \subseteq \{1, \ldots, n\}\), and a radius \(\epsilon\), we place an \(\epsilon\)-ball around each landmark and connect two landmarks when their balls overlap.
In that sense, Ball Mapper can be viewed as a landmark-based simplification of the 1-skeleton of a Rips-like construction: it keeps the large-scale geometry while using far fewer centers than the full dataset.
11.3 Example in Julia
To exemplify, consider a circle:
X = sphere(1000, dim = 2)
metricspace_plot(X, markersize = 4)
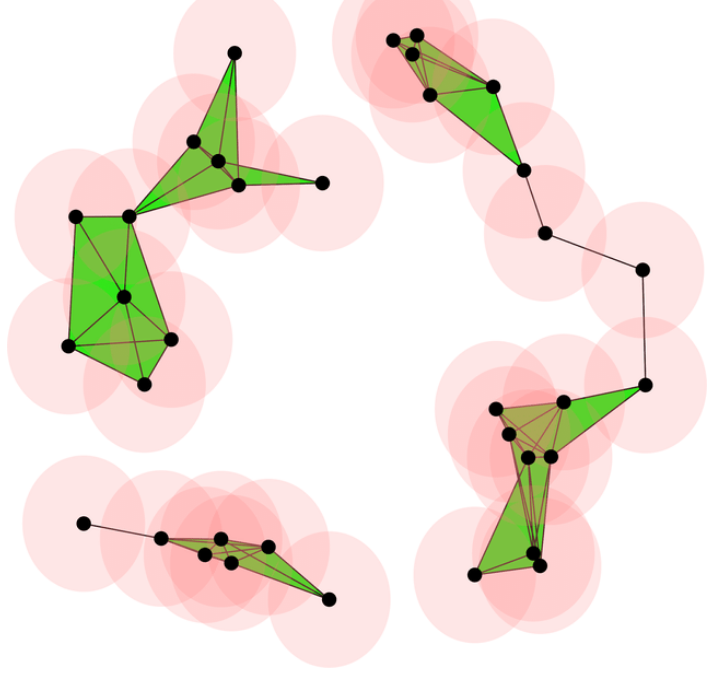
Now choose 100 landmarks with farthest-point sampling and build the Ball Mapper graph:
L = farthest_points_sample_ids(X, 100)
bm = ball_mapper(X, L, 0.35)Mapper graph with 100 vertices and 1078 edgesmapper_plot(bm, node_values = node_colors(bm, first.(X)))
The resulting graph is a combinatorial shadow of the circle: it keeps the loop, but with far fewer nodes than the original point cloud. That is the point of Ball Mapper: summarize shape without carrying every point around.
11.4 Remarks
- The landmark set \(L\) controls the resolution.
- The radius \(\epsilon\) controls how much overlap we allow between neighboring balls.
- If \(\epsilon\) is too small, the graph becomes disconnected.
- If \(\epsilon\) is too large, the graph collapses and loses shape information.
Ball Mapper is especially useful when the raw point cloud is large, because it compresses the dataset before building the graph.